HI,
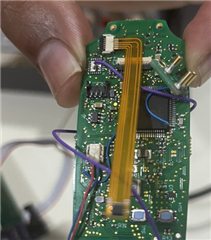
We are trying to run Temperature sensor TMP117 through I2C communication using flex PCB.
We tried many times to change the temperature around and change the code but it gives same response , it gives 68.2F all the time.
Could you suggest what should we do.