


Hi team,
Here's an issue from the customer may need your help:
During the road test, the point cloud data output from AWR2944 was passed through matlab to make a range-time image, resulting in a point cloud discontinuity issue. The R-t plot looks like this:
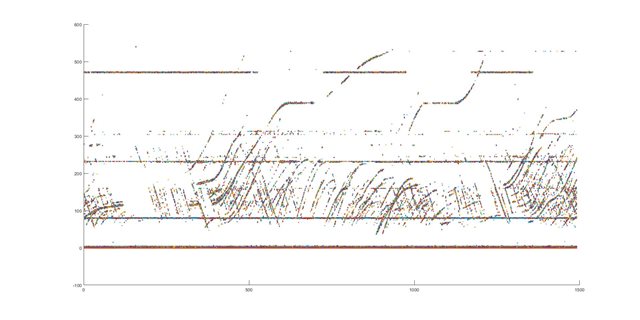
Discontinuities in close proximity to the target are particularly evident. Theoretically, the signal-to-noise ratio of the echo signal should be larger when the target is close.
The test scenario is a 4 lane wide bi-directional lane. The point cloud of the target can become discontinuous for a period of time when vehicles away are waiting for the traffic light to cross.
The scene of the intersection is as follows:

During the test, it was found that the number of point clouds detected per frame was between 35 and 50 points, far less than the limit of 1800 point clouds.
The code used is the code of the SDK and uses DDMA mode with a set frame period of 200 ms. During the local-maximum detection phase, in addition to comparing the peaks detected by the cfar with adjacent units, the comparison to the angle channel and Doppler channel thresholds currently in rangeBin is enabled.
What could be the possible cause of this issue? Could you help check this case? Thanks.
Best Regards,
Cherry
