Hi,
We're using a custom cascade RF board which is designed as per the guidelines given by TI to design a 4-chip cascade board.
We're using mmwave studio to collect data and as per this guide (https://www.ti.com/lit/an/spracv2/spracv2.pdf), we have generated a calibration file in a clean environment for each board(TI cascade board and custom cascade board board) and we're restoring it after configuring the board to capture data.
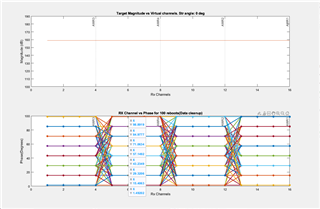
We have a corner reflector kept at boresight, outside the far field distance, in front of the radar. We're capturing data through mmwave studio, power cycling the radar, and capturing it again after configuring it and restoring the calibrations. This sequence is repeated 10 times. The first 3 frames are ignored, as per guidelines and the 6th frame is plotted for each file, which has 10 frames in total. The same configuration and capture LUA script are used for both boards.
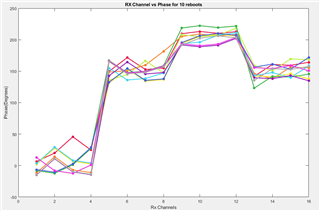
This photo shows how the phases look when we use the cascade board
This one shows the Rx phase for our board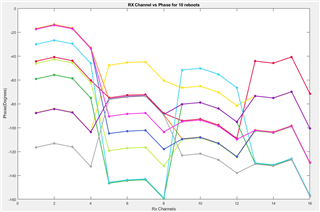
As you can see, the phases between reboots with the TI cascade board, although varying, are following a pattern. But from the custom board, it looks to be all over the place.
Can you please help me figure out the answer to these questions?
1. Is there a step that we're missing in mmwave studio, regarding initialization and calibration? We're using the LUA files supplied by mmwave studio. The only difference is that the chirp profile is different.
2. Have you guys seen these seemingly random phase jumps between power cycles? Any tips on why the phase between AWR chips is spread out across this big range? What can we do to prevent/minimize it?
3. In the first photo, why does the phase of RX channels from any one AWR seems to change upon every reboot?
4. The phases of the Rx channels, for a single target at boresight, should ideally be the same, but it's not. is this expected?
We have gone through this guide (https://www.ti.com/lit/an/spracf4c/spracf4c.pdf), the guide mentioned above, and the APIs in the ICD regarding cascade calibration so far. Please let us know if there's any other reference material I missed.
Any and all help would be greatly appreciated.