Other Parts Discussed in Thread: DRV5055
Hello,
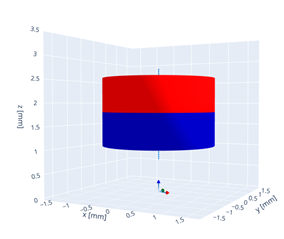
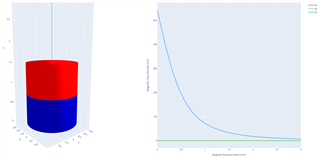
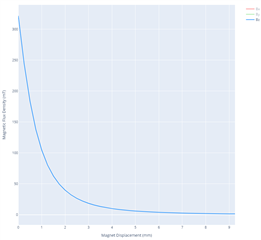
I am a bit confused on how the sensitivities and measurement ranges work for the DRV5056 and the DRV5055. I have 3 different hall-effect sensors (DRV5055 A3, DRV5055 A4, and the DRV5056 A4). I also have a variety of magnets, but I started by using an N35 disc magnet with a radius of 1.25 mm and a thickness of 1.5 mm. I found TI's DRV5056 proximity sensing tool online, have downloaded it, and have been using it as a design tool. This is where I am getting confused with the sensitivities and ranges.
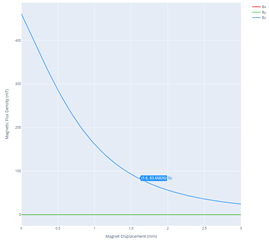
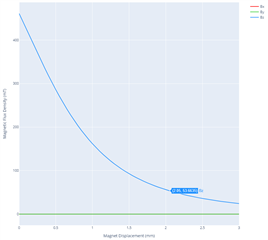
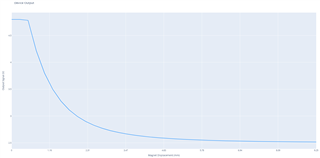
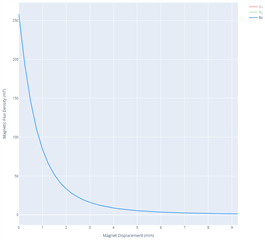
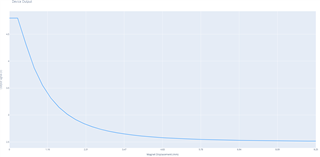
According to this design tool, and other equations that I have found, at 1.6 mm away from the surface of the magnet, the magnetic flux density should be about 83.65 mT. This value is well within the range of the DRV5055 A4 and the DRV5056 A4, and it is at the top of the range for the DRV5055 A3. So, if I am understanding the spec sheets correctly, for the DRV5055 A3, when my magnet is 1.6 mm away, the output from the A3 should be approximately equal to my input voltage of 5 volts, correct? However, this is not the case, at this distance for this sensor and magnet combination, I am reading 3.23 volts.
When using the DRV5056 A4, I find that the output voltages that I measure do not correspond at all to what is predicted by the proximity sensing tool.
So, I am a bit confused by what voltage values I should be expecting for a given distance. I am also confused on what the sensitivity values mean and how they even factor into my measurements. So, I was hoping someone would be able to help clarify this for me.
Thank you in advance for any help or information that can be provided.
- Ross Zameroski