Other Parts Discussed in Thread: IWR6843
Hello,
I would like to use I2C to send data to another device. In this case, the IWR6843AOPEVM is the slave and the other device is the master. Basically the master wants to read a register inside the radar sensor. So the code is just a I2CSlave_write() inside a loop.
//Loop inside thread
while(1)
{
retVal = I2CSlave_write(i2cHandle, &txData, 1);
if(retVal == false)
{
System_printf("Write failed\n");
}
else
{
System_printf("Write Success\n");
txData[0]++;
}
}
My problem is similar to the one described in these two threads:
- https://e2e.ti.com/support/sensors-group/sensors/f/sensors-forum/1054081/iwr6843isk-ods-issue-on-i2c-slave-driver-api?tisearch=e2e-sitesearch&keymatch=6843-i2c-slave#
- RTOS/AWR1642: Read Issue from I2C Slave - Sensors forum - Sensors - TI E2E support forums
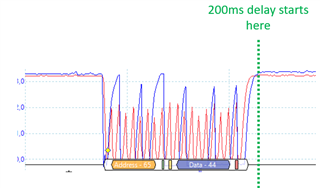
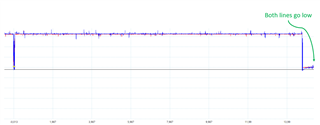
Indeed, I would like to read from the slave every 5 to 10 ms, but this makes the slave wait forever after the second I2CSlave_write() command. However, if I wait ~200 ms before sending a new "read command", it works without any problems.
I see, that the answer from the first thread I linked is that this problem would be patched in the next SDK. I am using SDK 3.6 and still have this problem.
Has it been patched? If not, is there a solution to this problem?
Thanks in advance.
Best regards,
Julien