Hi E2E experts,
I'm going to measure 300mA Ipn residual current, with better than 1% zero offset current. I saw some products manufactured by European companies, It seems they are using DRV401 inside.
When reading datasheet of DRV401, I'm confused in the description of compensation loop in page3:

My questions are:
1. What does the COMPENSATION LOOP mean? are the specifications here measured using closed loop with probe and compensation coil? or they are only the specifications of the integrator and filter stages?
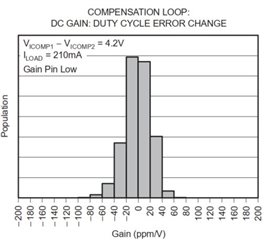
2. The 0.03% offset error: does this mean when primary side current is zero, the PWM duty cycle may vary from (50-0.03)% to (50+0.03)%? Is this measured in PWM pin? or it is actualy measured from the feedback current in closed loop back-calculated to a equivalent duty cycle?
3. Does the offset=0.03% mean I can get 0.03% zero offset current? for example: when measuring 300mA current, the zero offset current will be 0.03%*300mA=90uA?
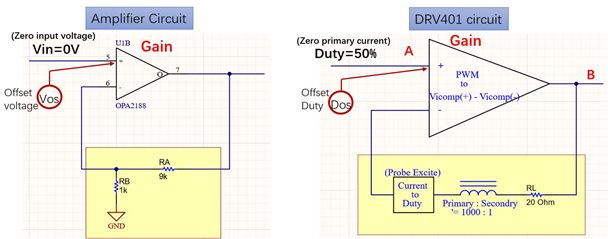
4-1. About the Gain: what does the 25ppm/V Gain mean? does this mean (duty cycle from 50%)/(coil driver differential voltage)?
4-2. About the Gain: what does the |VICOMP1|-|VICOMP2| mean? it seems VICOMP1 and VICOMP2 all are positive voltage (the absolute value of a positive value is itself), do you indeed mean |VICOMP1-VICOMP2|?
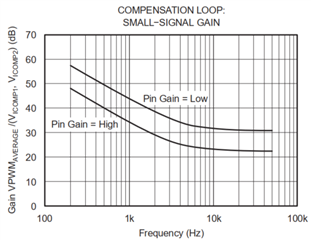
5-1. About the Y-axel label in figure below (in page9 of specification sheet): what does VPMW_AVERAGE mean? what does (VICOMP1, VICOMP2) mean ?
5-2. Also about the figure as below, it seems the Y-axel label should be (VICOMP1, VICOMP2) / VPMW_AVERAGE? am I correct?
Looking forward for your reply. Thank you very much!
Yours sincerely,
A_M