


Other Parts Discussed in Thread: AWR1843
hello,
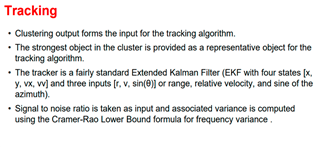
I am using the radar awr1843 with OOB demo and I want to implement the tracking algorithm in that demo (OOB). From what I have looked at, I found that the tracking algorithm is implimented as explained in the screenshot below :
So I want to know what are these variables:
- four states [x,y,vx,vv] correspond to which variables in the OOB demo. ?
- [r,v,sin(theta)] correspond to which variables in the OOB demo. ?
- rangeSNRdB and dopplerSNRdB correspond to which variables in the OOB demo. ?
And if there are variables that don't exist in the OOB demo, I want to know how to calculate and add them ?
Best,
Ben Hassine
