


Other Parts Discussed in Thread: DCA1000EVM,
Hello, Ti.
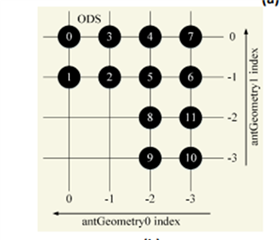
I am using DCA1000EVM + IWR6843ISK-ODS radar to extract 3d point cloud data. Using DCA1000EVM we are able to get rawdata from radar and we are using matlab to process the raw data.
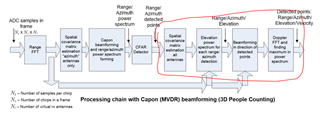
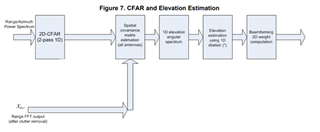
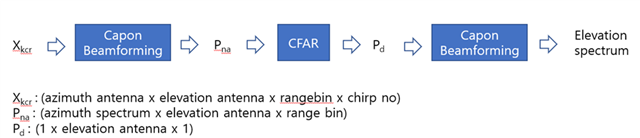
I am able to get range-doppler, range-azimuth map, but the problem that i'm having is getting elevation using capon algorithm.
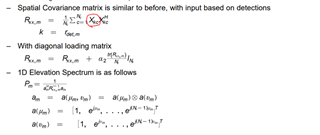
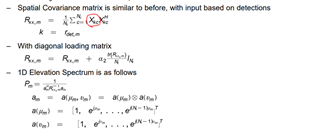
So I'm trying to refer to pages 13 to 15 of the guide below, but I don't understand the formula completely.
Is there sample code that i can refer to?




{kind=link}