A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
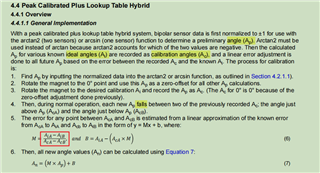
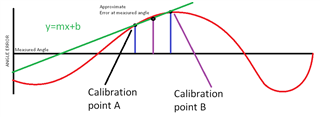
Thank you for reaching out on E2E. The multi-point calibration method shown here looks for the difference between two known angles and compares this to the difference between measured angles. What is being attempted is to piece together a linear approximation of the error across the rotation distance. The assumption is that the error will change linearly between point A and point B. The quality of this assumption improves the closer the two points are to each other. The equation here is following the format of y = m*x +b. Where m is the slope between any two calibration points and b is the offset.
This calibration approach is discussed more in the following application note:
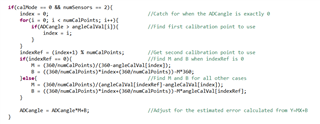
NumCalPoints is the number of calibration points selected. Suppose I select numCalPoints as 36.The difference between each calibration point is 10°
AngleCalVal[i] is the Angle corresponding to each calibration point, but is this Angle the actual true Angle? For example, when the magnet is really rotated by 10 degrees, the Angle read by the sensor may be 9.95 degrees or 10.05 degrees. Is this understanding correct?
For this calculation, it looks like you are always referencing the 360 degree measurement. The better way to implement this is to calculate the slope and offset the the line that connects two adjacent calibration angles (which may or may not be evenly spaced about the full rotation):