


Hello Team,
Posting on behalf of my customer:
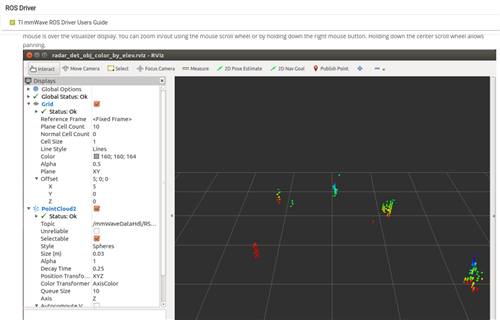
I'm trying to repeat a lab in the resource explorer by IWR6843AOPEVM, /mmwave radar sensors/embedded software/radar toobox 1.00.01.07/example projects/robotics/ros driver. I have run the OOB with SDK in 3.4 version. My ubuntu version is 18.04.6, and my ros version is melodic. Then I follow the manual in ROS Driver and change the serial port into ttyUSB0. After launching the ti_mmwave_rospkg 6843AOP_multi_3d_0.launch, the rviz can be started successfully and point clouds in red can be seen in the rviz.
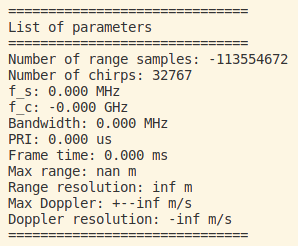
However, I find parameters related to the sensor configuration are not set successfully in ROS. The value is either 0 or an inf.
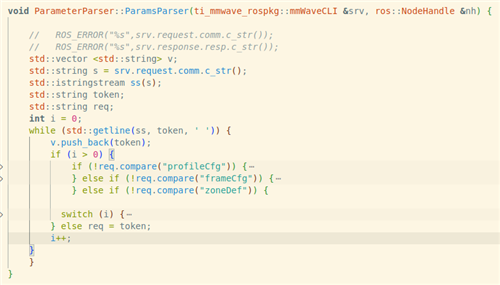
For this issue, actually I have found where the problem is. A while loop in the "ParameterParser.cpp" source code is not started because the value of a variable i stays 0, which should have incremented by 1 with the loop. After I put the i++ into the right place, the bug is fixed and the values of parameters return normal.
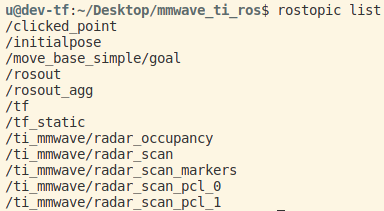
Another problem is that I cannot find a ros topic named /mmWaveDataHdl/RScan shown in the manual. Below are all my ros topics in the list. And my point clouds are totally red circles, rather than some colorful points in the demo.
Here are all my issues. Thanks for your help.
Regards,
Renan
