Other Parts Discussed in Thread: AWR6843AOP
Hello again,
So I need to use ROS for my project with the AWR6843AOPEVM board, I digged into documentation a little bit, mainly the TI mmwave ROS driver user guide.
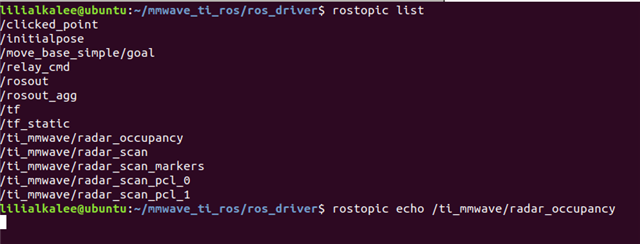
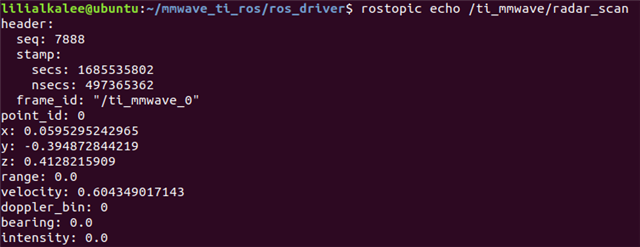
I flashed the demo into the radar, done every step with the driver and all. Once I get to launch the 6843AOP_multi_2d_0.launch file (for testing), I get no error. However when I look into my topics, nothing is received in the terminal. Why is that.
Are there other ROS leads to look into in my case.
Thanks and regards.