Part Number: AWR6843AOPEVM
Hello TI,
So, my purpose is to get the sensor data in a python code that do other things based on this data.
I tried using the follwoing GIT REPO which is quite easy to understand and is supposed to work, but ...
Here are my different steps :
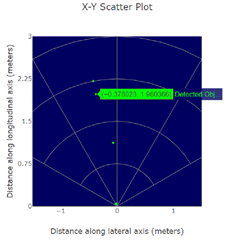
1- Tested the radar by uploading the demo and a config file through the mmWave visualizer, saw the plots, PERFECT.
2- I quit the mmWave Visualizer and go check data on a serial print monitor, I get some confusing HEX data where I can still see my magic word, data is printed continuously, I don't decode it.
3- I try to launch the given python code to read my data, I take off the Gui part + the config file sending part (Because it doesn't seem to work, I do this part manually through the mmWave visualizer).
Here is what my troubleshooting of the read function gave :
◊ The code works just fine till line 204. This means that the magic word is OK
◊ In that line, the problem is with the TLV_TYPE which is never equal to 1 as given in the MMWDEMO_UART_MSG_DETECTED_POINTS :
When I print the value of TLV_TYPE calculated in line 198, I always get weird and different values.
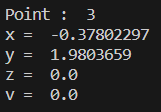
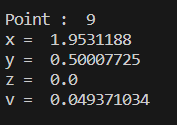
◊ Last thing, if I force my TLV_TYPE to 1 to get some data objects, the detected object is empty and gives nothing.
Could you please help me either with the available code with the right modifications (to get the right TLV type value because I think that the received data is not being used correctly in that part).
Or any ready to use code to retrieve the detected points of the radar, because I need those data for other processing matters.
Thanks and regards,
Lilia.