Other Parts Discussed in Thread: OPT3101, SEGGER, MSP430F5529
I have installed Code Composer Studio and opened the SDK_OPT3101 project within it. The project compiles without errors. Now, I would like to make modifications
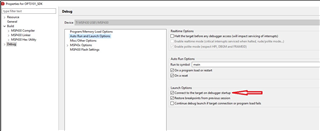
to the source code to control GP3 or GP4 when the distance falls below a certain threshold. I would like to do this using an existing Segger J-link debugger.
Could you please let me know how to integrate this debug tool into CCS? Additionally, I have not yet figured out how to save the configuration data stored in EEPROM
so that I can rewrite it in case of any changes. I would greatly appreciate any support with these questions.
Kind Regards
Thomas