


Hi,
I am currently capturing data using the mmwave demo for IWR6843ISK and using the mmWave Demo Visualizer.
Following is the reference I am using for TLV packet decoding:
/ti/mmwave_sdk_03_05_00_04/packages/ti/demo/xwr68xx/mmw/docs/doxygen/html/index.html
Besides getting the detected objects with their x, y, x, velocity information (as per DPIF_PointCloudCartesian_t structure) I would also like to get the "Side information of the detected objects" of type MMWDEMO_OUTPUT_MSG_DETECTED_POINTS_SIDE_INFO
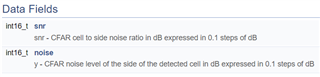
According to the DPIF_PointCloudSideInfo_t struct reference, following information is provided for each detected object:
Following are my questions:
1 - snr is an indication of how good the signal-to-noise ratio of a particular detected object is. Therefore, high snr can be used as a confidence of good detection for each object. Is this assumption true?
2 - noise is the measure of noise in the vicinity of the target object. Therefore, if I add the noise (in dB) to snr (in dB) I can calculate the signal level (in dB) for the detected object. Is this line of thinking true?
3 - What type of CFAR is used for the snr and noise calculations above? Is there a TI reference that describes this computation in detail?
Thank you for your help.
Regards...
