Hello,
Refer to "hard_coded_config_user_guide.html", Hard code is implemented to mobile tracker example.
And hardCodedConfigCommands[] is updated as the "Mobile_Tracker_6843_ISK.cfg"
char * hardCodedConfigCommands[] =
{
"sensorStop",
"flushCfg",
"dfeDataOutputMode 1",
"channelCfg 15 7 0",
"adcCfg 2 1",
"adcbufCfg -1 0 1 1 1",
"profileCfg 0 60.5 100 25 69 328965 0 50 1 256 6000 0 0 30",
"chirpCfg 0 0 0 0 0 0 0 1",
"chirpCfg 1 1 0 0 0 0 0 4",
"chirpCfg 2 2 0 0 0 0 0 2",
"frameCfg 0 2 32 0 100 1 0",
"lowPower 0 0",
"guiMonitor -1 1 0 0 0 0 0",
"cfarCfg -1 0 2 8 4 3 0 20 0",
"cfarCfg -1 1 0 4 2 3 1 15 0",
"multiObjBeamForming -1 1 0.5",
"clutterRemoval -1 0",
"calibDcRangeSig -1 0 -5 8 256",
"extendedMaxVelocity -1 0",
"bpmCfg -1 0 0 1",
"lvdsStreamCfg -1 0 0 0",
"compRangeBiasAndRxChanPhase 0.0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0",
"measureRangeBiasAndRxChanPhase 0 1.5 0.2",
"CQRxSatMonitor 0 3 15 125 0",
"CQSigImgMonitor 0 115 6",
"analogMonitor 0 0",
"aoaFovCfg -1 -90 90 -90 90",
"cfarFovCfg -1 0 0 11.11",
"cfarFovCfg -1 1 -2.04 2.04",
"staticBoundaryBox -1.8 1.8 0.4 7.8 -0.2 1.8",
"boundaryBox -2 2 0.5 8 -0.3 2",
"sensorPosition 0.5 0 0",
"gatingParam 4 2 2 2 10",
"stateParam 10 5 5 50 1 600",
"allocationParam 20 20 0.05 4 2 2",
"maxAcceleration 0.1 0.1 0.1",
"trackingCfg 1 2 250 20 20 260 90",
"presenceBoundaryBox -3 3 2 6 0.5 2.5",
"sensorStart",
"!!!END_OF_HARD_CODED_COMMANDS"
};
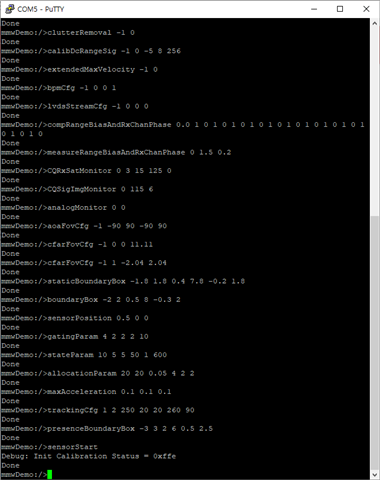
In below terminal, Command looks like send correctly.
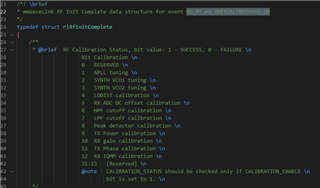
But debug message occurs after sensorStart. "Debug: Init Calibration Status = 0xffe".
I can't find the reason.
Please let me know why RL_RF_AE_INITCALIBSTATUS_SB occurs.
- SDK: mmwave_sdk_03_06_00_00-LTS
- Tool box: radar_toolbox_1_00_01_07
- Example: mobile_tracker