Why the max range non beamsteering and beamsterring is the same while angle less than 40 degrees?
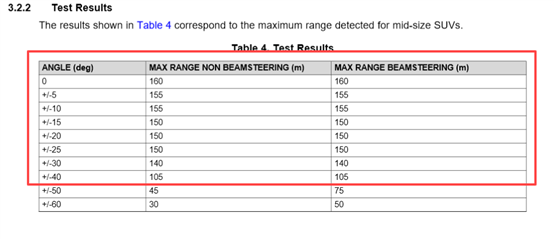
We checked from the design guide "Beamsteering for Corner Radar Reference Design", and the test result for max range non beamsteering and beamsterring is the same while angle less than 40 degrees.
If non beamsteering mode is MIMO mode with TDM, it does not make sense to have the same detection ability as beamsteering mode.
Since I cannot find this demo with the Automotive Toolbox from the TI Resource Explorer, I would like to know the profile settings for Non Beamsteering.
I guess it is not MIMO mode by TDM (AWR1843 EVK), it should transmit TX1 & TX2 & TX3 at the same time to get the longer detection range.
But the HFOV should be narrow by transmit TX1 & TX2 & TX3 at the same time, thus, +-40 degrees keeps the same range detection as beamsteering mode, it does not make sense as well.
In order to clarify it, could you help me to get more information?
Thanks a lot.