Hi,
I am working on the motion detection demo present in the SDK 5.1 and facing issues with re-starting the sensor.
I have removed the CLI, loaded the default configuration(hardcoded it), created the tasks "dpc_task"(priority 5) and "transmit output tasks"(priority 3) once only (rather than creating it everytime inside a seprerate task for Sensor Start).
We have created two functions which enable sensorstart and sensorstop separately and i am trying to achieve the repeated sensor start and stop using these two functions.
1. Initially, I am able to start the sensor using this function which is called in motion_detect() after creating dpctask and transmit output tasks.
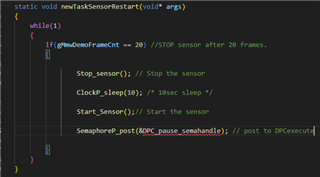
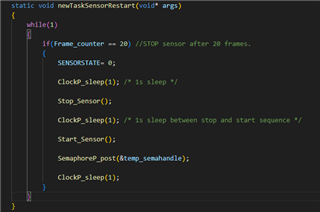
2. After 20 frames of data is processed, i call the stop function to stop sensor in transmit output task(which is happening properly too)
3. Right after this, After giving a delay of 10 secs, i want to start the sensor again using the same sensorstart function, in transmit output task itself. And i fail to do so. The sensor does not start again. Also, I am not able to access dpc_task again, as if its suspended or the task itself is deleted.
Could you please let us know why sensor restart is not happening as expected and why does the dpc task behave like it’s suspended or deleted.
Thanks and Regards
Bodhit Gupta