Hi,
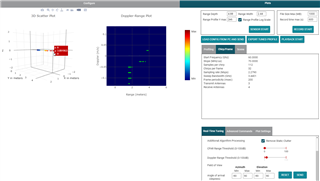
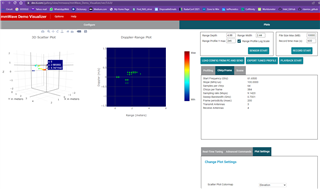
I have collected data indoors from a few static human poses using the point cloud extraction using the mmWave Demo Visualizer platform. I captured this data from different distances to the radar (between 2 meters to 3 meters).
When I decoded the TLV packets in the *.dat file (including the x, y, z coordinates, Doppler shift as well as snr and noise), I noticed that the z value for each detected point is always reported as 0.0. The x and y coordinates are within my expectations so I know the decoding process is correct.
I have attached the configuration file I have used for initializing the platform in case there is an issue with it. I have also attached a sample *.dat file that was collected using that configuration file.
If you can shed light onto what I may be missing here that will be very helpful.
Regards...