Other Parts Discussed in Thread: AWRL6432
hi,
I got the AWRL6432BOOST, and strted with this guide:
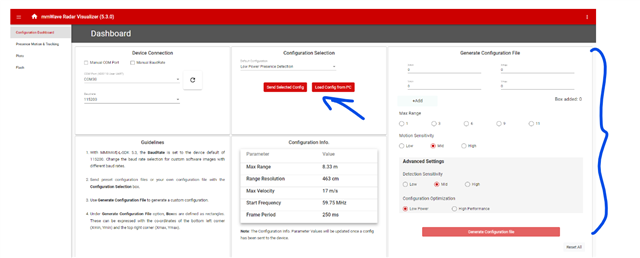
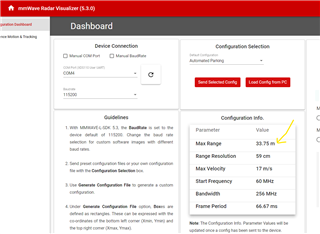
I opened the "mmWave Radar Visualizer (5.3.0)", and there tried all configurations:
I moved my hand in fron of the radar board, and faced it towards the ceiling. I barely see any noticable/consistent detections of my hand/ceiling.
I have 2 questions:
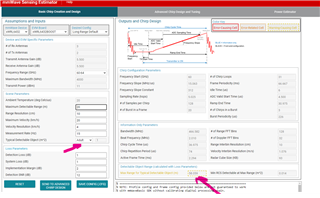
1. is there any out-of-the-box configuation that will allow me to detect a person at 30m?
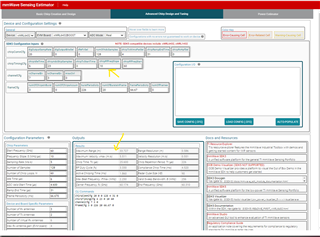
in the mmWave sensing estimator it seems very reasonable with this board...
2. how can I see range-Doppler map?
thanks!