Hi,
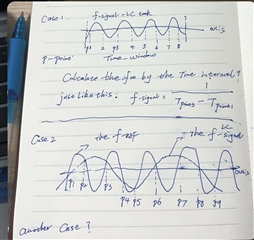
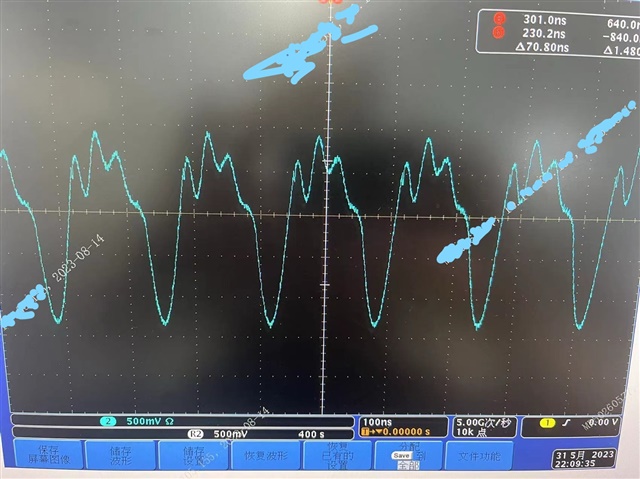
I would like to ask if the input waveform of the FDC2112 is such a signal and its positive and negative half cycle are asymmetrical, would it affect the output of the FDC2112? ,you can see it in this picture.
Original question:

Hi,
I would like to ask if the input waveform of the FDC2112 is such a signal and its positive and negative half cycle are asymmetrical, would it affect the output of the FDC2112? ,you can see it in this picture.