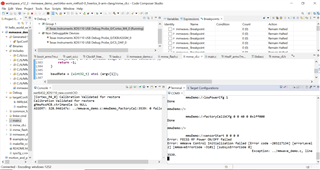
I was trying to run the mmwdemo project from MMWAVE_L_SDK 5.3 through CCS. I found that I am getting some print like [Cortex_M4_0] Calibration Validated for restore waited for sometime and Iam not able to see anything after that. I have debugged that the code is running in the function "UART_readPolling" and nothing after that.
Should there be any waiting time for the same.
How to debug this issue?
Also found that not entering this if condition also
if(UART_isRxRdy(object->pSCIRegs))
{
UART_rxChar(object);
}
Please help us to debug the same as it is important for our next development to proceed.