Hi TI experts,
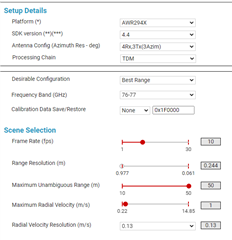
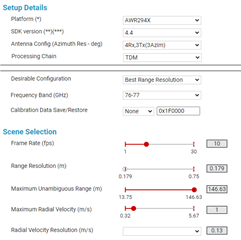
In mmWave Demo Visualizer, three scenes can be selected. They are Best Range Resolution, Best Velocity Resolution, and Best Range, respectively.
1. What's the guideline for selecting scenes on the mmWave Demo Visualizer?
2. What is the meaning of "Best Range" literally? Does it mean that I can use this scene to detect the farther range of objects than the other two scenes?
Thank you.
Sean