


Multi-path/Refraction/Diffraction while Radar @77GHz and install on the side of the bus for BSIS functionality.
Test condition:
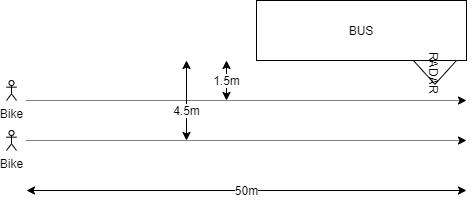
* Radar install on the side of the bus near right front wheel.
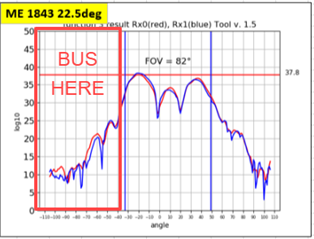
* AWR1843 with 3TX transmit and beam steering 22.5 degrees. (ME angle is 60 degrees) Main beam is 30-22.5 = 7.5 degrees near the bus. Below shows as antenna pattern.
* Target object is cyclic with rider, and start to ride from 50m far from radar and 1.5m/4.5m side of the bus (Two test cases).
* Rider start to ride from rear to front at speed ~15km/h, Radar output the detection result.
Test result:
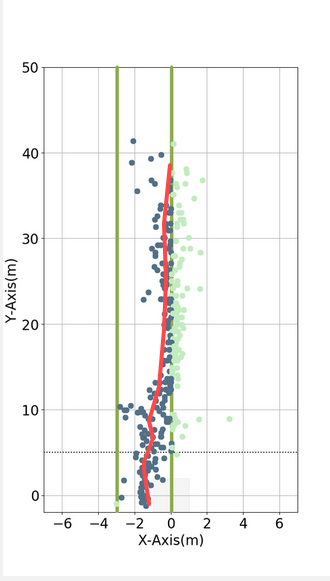
1. 1.5m test result, the path should be fine. (0, 0) is radar position.
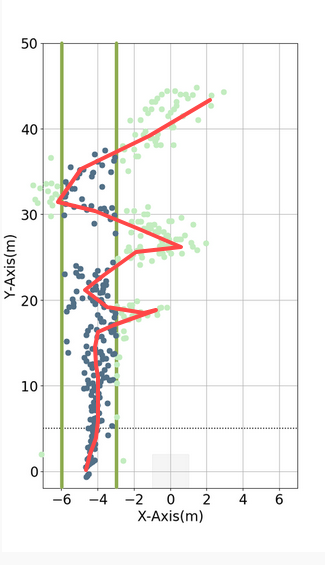
2. 4.5m test result, it seems caused by Multi-path/Refraction/Diffraction. (0, 0) is radar position.
If Radar does not install on the side of the bus, the test result is as following. There is no such issue.

We think it is caused by the Multi-path/Refraction/Diffraction, have any good idea to eliminate or improve it?
Many thanks.
