


Hi experts,
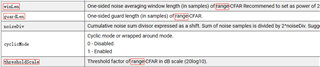
1.The cfar parameters (winLen, guardLen, thresholdScale...) that can be set in the current SDK are all range dimensions. Does Doppler dimension use the same parameters as range dimension? Can the parameters of range dimension and Doppler dimension be set separately?
2.Currently, the SDK only supports BPM mode. Is Doppler compensation and phase compensation done in the SDK in this mode?
3.When will the SDK supporting TDM mode be released?
Thanks!

