


Hi Team,
TI's 1843demo is being used. The program is an unmodified DSP-handled program (only some programs are added to the MCU that output to the upper computer which is developed by the customer).
Issue: In close range, the point cloud data of motion is recognized as a static target. The tests are as follows:
Test#1: Radar deflected at an angle:
- Figure 1 is a physical plot of the radar deflected at an angle, with a certain angle of angle relative to the earth coordinate system.
- Figure 2 is a diagram of the physical diagram of Figure 1.
- Figure 3 shows measured data of the proximity of the tested electric vehicle under this test condition.
From the test results, a stationary target appears in the final section (the red dots are stationary targets and the arrows are moving targets. The result is when the upper position machine is held for some time, so the motion target is not visible in the view)

Figure 1
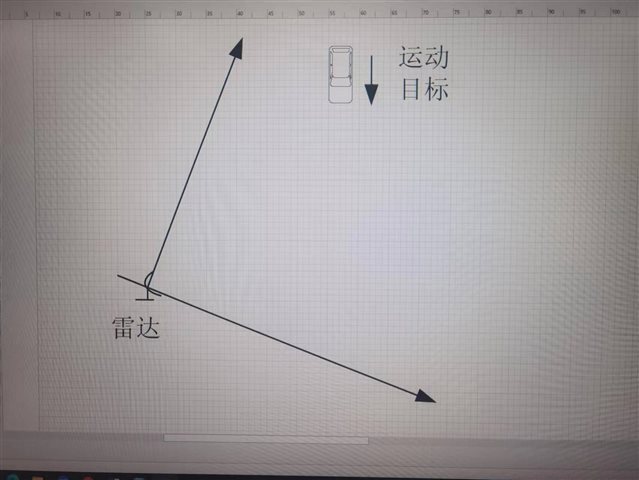
Figure 2
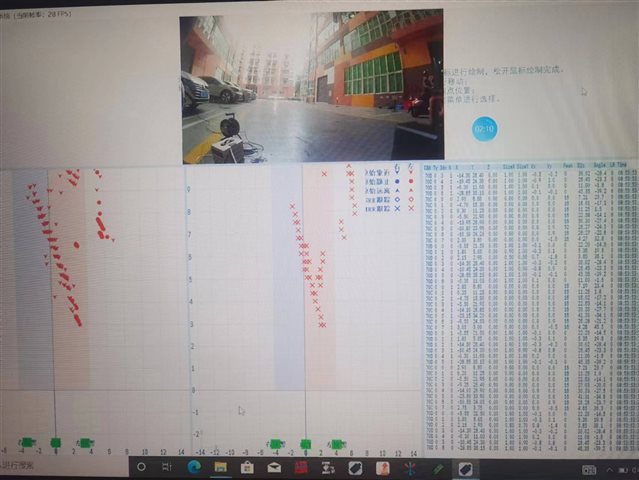
Figure 3
Test#2: The radar is off-set to 90 degrees
The radar is perpendicular to the earth coordinate system and then detects the moving target. The test diagram is shown in Figure 4:
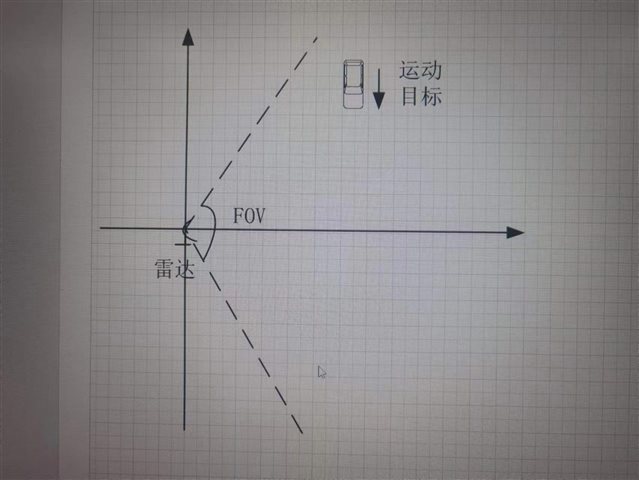
Figure 4
However, in areas close to the normal part of the radar, the target of the original motion is recognized as a static target. As shown in Figure 5, at approximately plus or minus one meter, the target of motion is recognized as stationary and, away from this area, as a moving target.
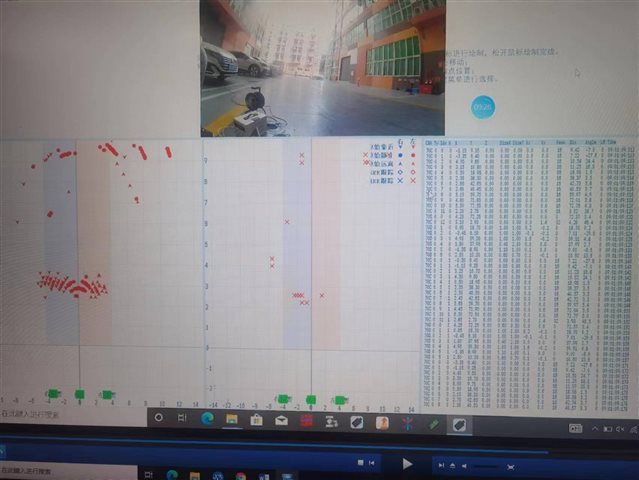
Figure 5
The customer would like to confirm that if the radial velocity is almost zero in the small area of the normal line? Could you help check it? Thanks.
Best Regards,
Cherry
