


Hello,
I'm facing a problem with the IWR6843. While the system correctly works in the most of the time, I just find a problem when a target approaches at low range.
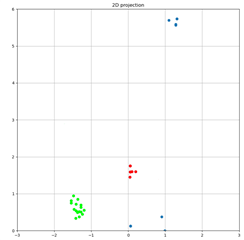
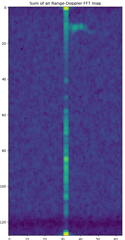
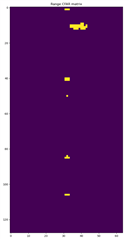
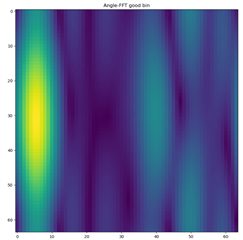
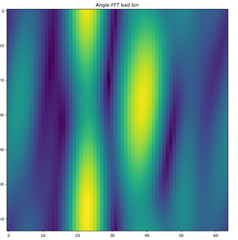
On my image bellow the point cloud generated after processing. Green points are correct, it's a approaching target coming from left side. And systematically, a group of points are generated in front of the sensor (witch is at the origin). All looks good: range doppler map, CFAR. But the angleFFT gives this strange phenomenon at low range. We can see the magnitude of the angleFFT for a good points (green) and a wrong point (red).
It's not a multipath reflection because ghost points are at the same radial distance.
When the target cross the scene at long range, the problem is not present.
Do you know this problem?
Thank and and best regards,
