


HI
Dear TI engineers,I‘m learning the 3D_people_tracking project,in the source file radarProcess.c,I found the code as follows:
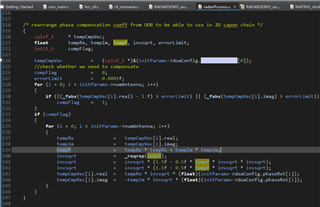
the note is 'rearrange phase compensation coeff from OOB to be able to use in 2D capon chain', how to understand the phase rearrange which can be used in the capon steering,is there any math theory?
Why is the antenna calibration coefficient compensated in advance on the steering vector, and perform the conversion as shown in the figure above
BR,
wenhong Liu.
