Hi IWR6843AOP Champ
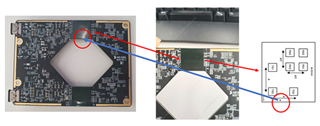
My customer manufactured a custom board using IWR6843AOP, and two AOPs are mounted on one board as shown in the picture below.

Firmware : "area_scanner_68xx_demo_aop.bin"
Chirp config : "area_scanner_68xx_AOP.cfg"
Visualizer : "area_scanner_visualizer.exe"
SDK : 'mmwave_sdk_03_06_00_00-LTS"
Toolbox : "radar_toolbox_1_00_00_26"
Test Result :
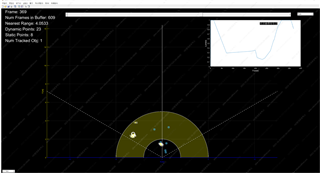
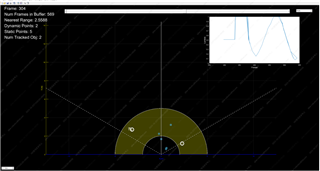
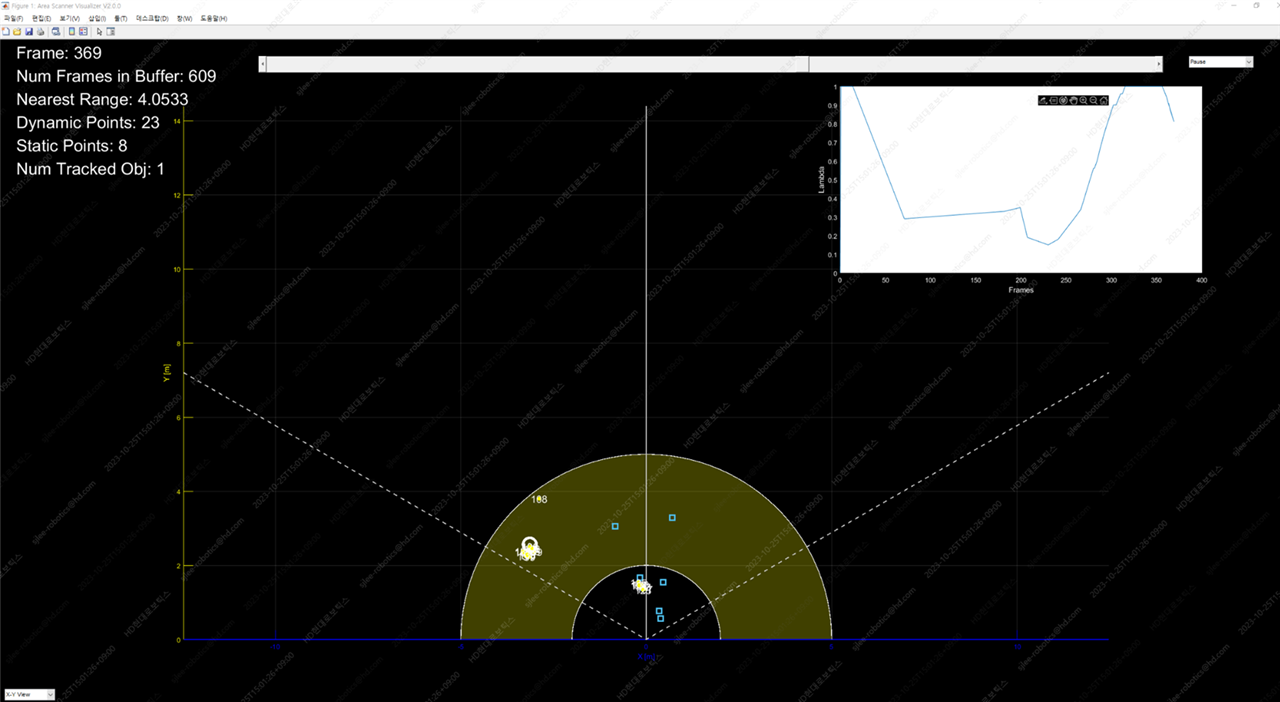
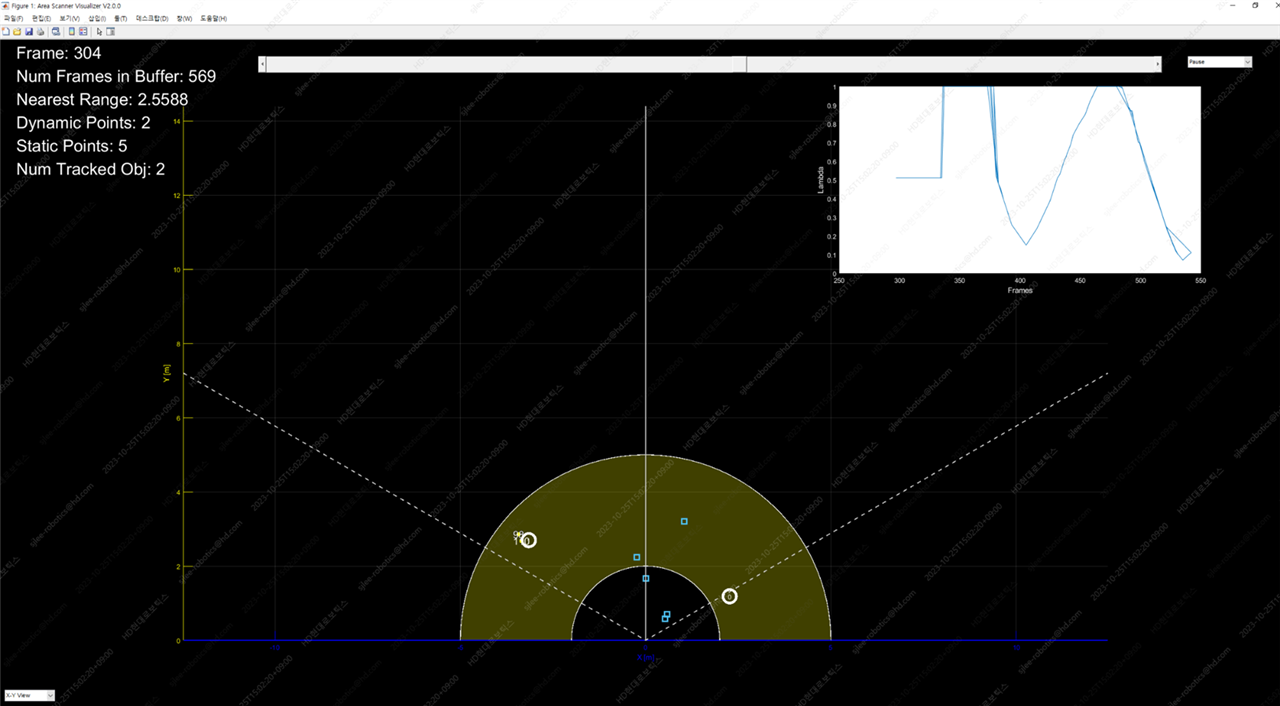
Radar device, located at the top, outputs the point cloud to a satisfactory level during cfar detection, and tracking works well for people.
However, the radar located at the bottom does not output the point cloud normally, and the human tracking results are not satisfactory.
As the distance between the human and radar increases, or the angle is closer to +-60 degrees, the point cloud is hardly output. Moreover, in the +-60 degree interval, people tracking rarely works.
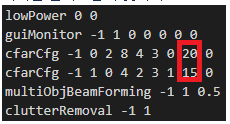
Among the following chirp configurations, we observed that lowering the <thresholdScale> parameter value of cfar in first & second alleviates symptoms. The amount of point cloud increases, but it is not satisfactory. i.e. 20->13, 15-> 8
Can you please give us any helpful guidance to figure out the cause of the problem?
Also we also need your kind help to improve the performance of the bottom side radar device.