Other Parts Discussed in Thread: AWR1642
Hello,
i am trying to figure out how the azimuth-angle estimation in the demo example is being calculated. I am using the AWR1843Boost.
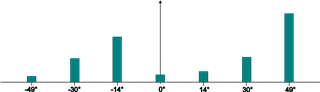
I understand, that the angle of a single reflector can be calculated using the formula phi = arcsin(omage / pi), where omega is the phase shift between the signal of two adjacent receive antennas. This works fine as long as I have only a single reflector in a given range/velocity bin. However, if I have multiple reflectors "located" in the same range/velocity bin I first have to perform the "angle-FFT" to separate the different phase-shift components. For the AWR1843EVM I have a maximum of 8-virtual antennas that I can use. This allows me to separate objects with a phase shift larger than delta_omega = (2pi / 8). Due to the nature of the fft I now only have 8 different (fixed) values for the possible phase shifts that I am able to observe. Using the above mentioned formula (phi = arcsin(omage / pi)) I can now only distinguish if an object is located around -49deg, -30deg, -14deg, 0deg, 14deg, 30deg or 49deg.
However the accuracy in the demo example seems to be way higher than the resolution. Even when multiple object fall into the same range/velocity - bin. Can you tell me how this i being done?
Kind regards
Mario