Other Parts Discussed in Thread: IWR6843, SYSCONFIG
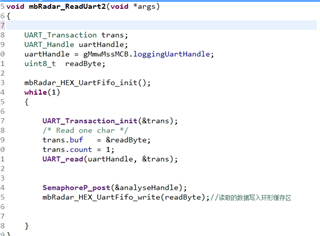
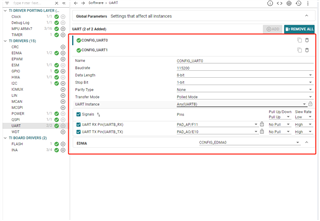
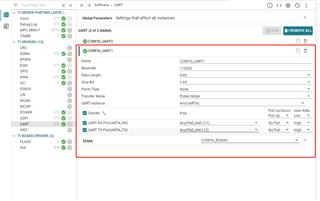
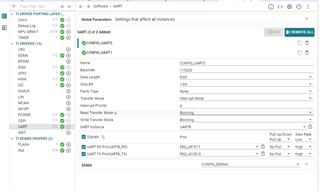
Consult a question about serial port. Two serial ports of radar are needed in the project, one is used to communicate with external MCU, and the other is used for debugging. Each serial port should support data reading and writing. By creating two tasks for serial reading, each with a priority of 1, similar to CLI_task. In two ways;
Mode 1: The serial port adopts the polling method, and two reading serial data tasks open at the same time will lead to incomplete data reading, and it is easy to lose packets. If only one reading serial data task is started, there is no problem of incomplete data reading and unable to read.
Mode 2: The serial port adopts the mode of interrupt blocking, and two reading serial data tasks can be opened at the same time, and there will be no problem of data not being read. With the need of external MCU through serial port with radar real-time communication, frequent mmwDemo_TransmitProcessedOutputTask after running for a period of time serial data output is suspended in the task, at this time send the CLI command can be normal receive radar. Whether frequent interruptions caused mmwDemo_TransmitProcessedOutputTask no data output the serial port. The main problems of the above two serial port methods are; The method of polling can not read the complete data, and the packet loss rate is high, which can only support one way of serial port data reading. With the method of interrupt, can support both road serial data read won't lost package, but will cause mmwDemo_TransmitProcessedOutputTask no serial data output. Please guide me on these two questions. thank you.