Hi,
I am working on the MMW demo in SDK 5.3, using BPM mode.
The path is: C:\ti\MMWAVE_L_SDK_05_03_00_02\examples\mmw_demo\mmwave_demo
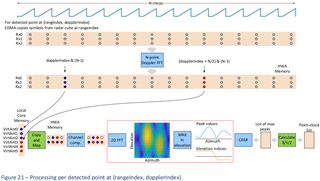
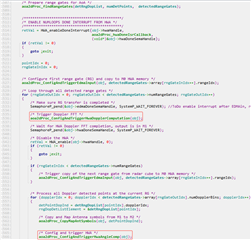
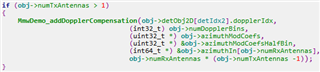
In aoa2dproc.c, I didn't find the code about doppler compensation, could you please point out where doppler compensation is implemented? I may need to modify this code.
Thank you.