Hi Dear,
I am curious about why can SNR be equal for each other if the unit is different?
 (The code is located ‘DPU_TrackerProc_CartesianToSpherical’ function in trackerpro.c)
(The code is located ‘DPU_TrackerProc_CartesianToSpherical’ function in trackerpro.c)
For ![]() , this SNR will feed into the GROUP TRACKER STEP to do some processing and it is Range detection SNR in linear, for
, this SNR will feed into the GROUP TRACKER STEP to do some processing and it is Range detection SNR in linear, for , this SNR is CFAR cell to side noise ratio in dB.
, this SNR is CFAR cell to side noise ratio in dB.
From my understanding, dB is the unit of 20*log10(Ps/Pn) or 10*log10(Ps/Pn), and linear is used to describe Ps/Pn, here Ps is the power of the signal and Pn is the power of noise.
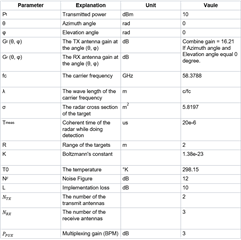
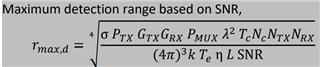
In addition, according to the equation below picture, I want to derive out sigma (Radar Cross Section, RCS), and assuming all parameters are known, what kind of SNR is correct?
I have taken "set.totalSNR" from the 'gtrack_moduleAllocate' function
to obtain the first RCS when the new tracker is allocated, and in each frame, I have taken "goodPointsSnr" from the "gtrack_unitUpdate" function to update the RCS, but the RCS is unstable due to SNR is unstable too.
For example,
In the n-1 frame, SNR=86.84 db and R=2.41 m => RCS=21.47 dBsm
In the n frame, SNR=70.98 db and R=2.38 m => RCS=5.37 dBsm
In the n+1 frame, SNR=137.28 db and R=2.39 m => RCS=71.77 dBsm
The ideal RCS=7.649 dBsm, based on the equation below the picture,and fc=58.378GHz.
Note the unit of RCS is m2 if RCS is computed by the below equation, need use10*log10(.) transfer the unit to dBsm.