


Hello,
I'm using Texas Instruments' IWR6843AOP for people tracking and plan to apply the tracking algorithm from AREA SCANNER with MATLAB-based visualization.
I am currently making modifications to the .c file in the gtrack folder using CCS. During this process, I aim to incorporate static points into the track generation.
However, upon reviewing the current tracking algorithm, it appears that all static points are being eliminated, and only dynamic points are being utilized.
Therefore, I have a few questions regarding this matter.
My questions are:
1. To examine the existing static points, it is necessary to modify the 'clutterRemoval' parameter in the cfg to observe static points while running the area scanner demo. However, the C code indicates that all static clutter is being removed, as depicted in the accompanying image.
(Source of the figure below: https://dev.ti.com/tirex/explore/node?node=A__AFyYCAdcHqcZz7WN9UQc.g__com.ti.mmwave_industrial_toolbox__VLyFKFf__LATEST )
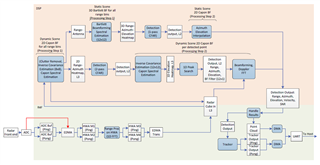
Which file should I modify if I intend to generate a track using all static points through C code?
2. While navigating through folders to leverage static points, I encountered a message indicating the deletion of static points from the DPU. Upon inspection, I observed that both the SDK folder and the RadarToolbox folder contain C files responsible for erasing the DPU and the static points. I am curious about the distinction between these two files.
(C:\ti\radar_toolbox_1_30_00_05\radar_toolbox_1_30_00_05\source\ti\dpu\staticdetproc\src\staticdetprocdsp.c)
(C:\ti\mmwave_sdk_03_05_00_04\packages\ti\datapath\dpc\dpu\staticclutterproc\src\staticclutterproc.c)
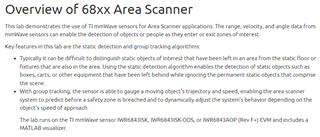
3. According to the area scanner user guide, the static points corresponding to the background are eliminated for a few frames following the initial radar execution, as illustrated in the figure below. Subsequently, the static points measured thereafter are managed independently. I am curious about the specific C file where I can locate these post-background removal static points.\
(Source of the figure below: https://dev.ti.com/tirex/explore/node?node=A__AONFBQevesFfseDnZda2rw__com.ti.mmwave_industrial_toolbox__VLyFKFf__LATEST )
Any insights or guidance on these matters would be greatly appreciated.
