


Other Parts Discussed in Thread: IWR6843ISK
Hello everyone, I'm facing a problem with my overhead people counting algorithm, it is placed above a hallway in front of an entrance door, the use case is a bi-directional counter for understanding the number of entries and exits.
The algorithm is very lightweight as it considers and processes just the X coordinate of the target it's seeing, this is due to the nature of the use case; the hallway is along the X direction therefore just one coordinate is needed.
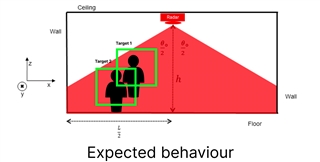
The problem is that it struggles in separating people when passing close together, it considers those as a single target (fig1 "current behaviour") while being multiple target (fig2 "Expected behaviour"). 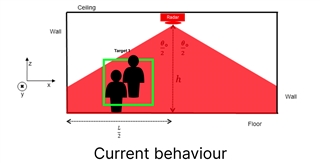
In my case the following parameters are valid: h=2.7m L=6m Θ=64° for such height i discovered i can reach a max detect distance of ~2.15m (using the formula found here) which is actually enough as my major problem is the detection sensitivity inside this area.
The hallway is about 6m long and large 2m, the sensor is installed on the ceiling (height about 2.7m), you can see the following fig3 for a brief summary map of the installation top view.

The cfg I am using is the following:
% SDK Parameters % See the SDK user's guide for more information % "C:\ti\mmwave_sdk_[VER]\docs\mmwave_sdk_user_guide.pdf" sensorStop flushCfg dfeDataOutputMode 1 channelCfg 15 7 0 adcCfg 2 1 adcbufCfg -1 0 1 1 1 lowPower 0 0 % Detection Layer Parameters % See the Detection Layer Tuning Guide for more information % "C:\ti\mmwave_industrial_toolbox_[VER]\labs\people_counting\docs\3D_people_counting_detection_layer_tuning_guide.pdf" profileCfg 0 61.2 60.00 17.00 50 657930 0 55.27 1 64 2000.00 2 1 36 chirpCfg 0 0 0 0 0 0 0 1 chirpCfg 1 1 0 0 0 0 0 2 chirpCfg 2 2 0 0 0 0 0 4 frameCfg 0 2 224 0 120.00 1 0 dynamicRACfarCfg -1 10 1 1 1 8 8 6 4 4.00 6.00 0.50 1 1 staticRACfarCfg -1 4 4 2 2 8 16 4 6 6.00 13.00 0.50 0 0 dynamicRangeAngleCfg -1 10.000 0.0010 2 0 dynamic2DAngleCfg -1 5 1 1 1.00 15.00 2 staticRangeAngleCfg -1 0 1 1 antGeometry0 0 0 -1 -1 -2 -2 -3 -3 -2 -2 -3 -3 antGeometry1 0 -1 -1 0 0 -1 -1 0 -2 -3 -3 -2 antPhaseRot 1 -1 -1 1 1 -1 -1 1 1 -1 -1 1 fovCfg -1 64.0 64.0 compRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 % Tracker Layer Parameters % See the Tracking Layer Tuning Guide for more information % "C:\ti\mmwave_industrial_toolbox_[VER]\labs\people_counting\docs\3D_people_counting_tracker_layer_tuning_guide.pdf" staticBoundaryBox -4 1.3 -0.9 2 -0.5 2.7 boundaryBox -5 1.4 -1 3 -0.5 2.7 sensorPosition 2.7 0 90 gatingParam 2.5 1.5 1.5 2 3 stateParam 3 3 6 15 3 1000 allocationParam 10 10 0.02 7 1 20 maxAcceleration 1 0.1 1 trackingCfg 1 4 800 20 37 33 120 1 presenceBoundaryBox -4 4 -4 4 0.5 2.5 sensorStart
