Hi,
I am testing the TMP1826 with an ESP8266 host controller, but I am unable to get any response from the TMP1826. Running the same code with an Arduino Nano works and the response pulse is detected, but it will not work with the ESP8266. Here is my code, test circuit, and oscilloscope data with and without the tmp1826 connected.
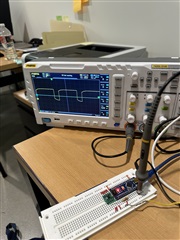
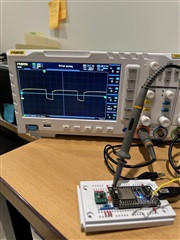
Without tmp1826 connected:

with tmp1826 connected:

test circuit:


code:
int tmp_pin = 16;
void setup() {
Serial.begin(9600);
sendReset(tmp_pin);
}
void loop() {
}
void sendReset(int pin) {
Serial.print("Sending RESET to TMP1826...\n");
pinMode(tmp_pin, OUTPUT);
digitalWrite(tmp_pin, HIGH); // Start with the line high
delay(10); // Wait for 10 milliseconds to ensure the line is seen as high
digitalWrite(tmp_pin, LOW);
delayMicroseconds(480);
digitalWrite(tmp_pin, HIGH);
//wait for response
pinMode(pin, INPUT);
while(digitalRead(pin) != 0);
while(digitalRead(pin) != 1);
Serial.print("Response to RESET received from TMP1826\n");
}
void sendBit(int pin, bool bitValue) {
digitalWrite(pin, LOW);
if(bitValue == 0x00) {
// tWR0L
delayMicroseconds(60);
} else {
// tWR1L
delayMicroseconds(2);
}
digitalWrite(pin, HIGH);
delayMicroseconds(2); // tREC
}
void sendByte(int pin, uint8_t byteValue) {
for (int i = 0; i < 8; i++) {
sendBit(pin, (byteValue >> i) & 0x01);
}
}
bool readBit(int pin) {
//digitalWrite(pin, LOW);
delayMicroseconds(2); // tRL
digitalWrite(pin, HIGH);
delayMicroseconds(1);
pinMode(pin, INPUT);
delayMicroseconds(1); // tMSP
bool bitValue = digitalRead(pin);
delayMicroseconds(45); // Remainder of the slot time
return bitValue;
}
uint8_t readByte(int pin) {
uint8_t value = 0;
for (int i = 0; i < 8; i++) {
if (readBit(pin)) {
value |= (1 << i);
}
}
return value;
}