


Good Day
I'm looking to make a 3d spacemouse with a couple hall sensors and a magnet in the center.
The magnet will be a diametrically magnetised cylinder magnet, with the rotational axis in the z-axis.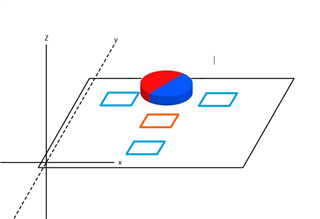
Goal is to be able to accurately measure all 6 axis with as few sensors as possible;
within a movement sphere of ~3mm(as in the magnet can travel +1,5 in x, and -1,5 in x, the same range applies to the y and z axis).
with a rotation range of 360° around the z-axis, and +- 20~30° around both x and/or y.
Question is if there are certain (preferably I²C) hall sensors that are designed for exactly this?
Because i wasnt able to find any.
The initial idea was to use a rotational hall sensor in the center(orange rectangle in the picture above), then add 3 3-axis hall sensors(translation in x, y and z; blue in picture) at a small distance with an offset of 120°.
This would give readings in all 6 degrees of freedom (with a bit of math), but would require 4 sensors; using quite a bit of space on a small pcb as well as multiple possible I²C addresses.
Im looking forward to feedback and am happy to answer further questions^^
With kind regards
Florian
