Other Parts Discussed in Thread: SYSBIOS
Hello,
I am using the AWR1642BOOST and attempting to display the output on the console for a gain block. My setup includes SDK version 3.06_01_00-LTS, XDC tools version 3.62, the latest version of CCS, and BIOS version 6.73.01.
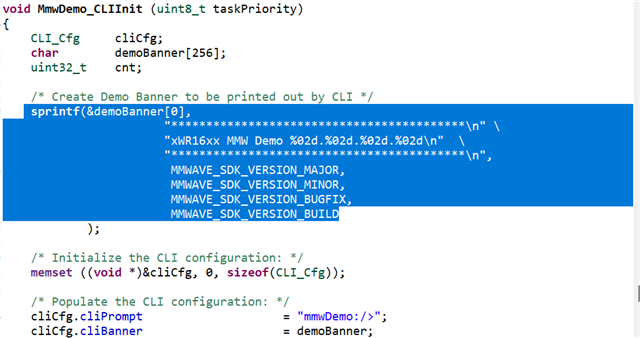
When I try to print the output using the UART_write command or CLI_write command for my specific code, nothing gets printed. However, a line from the cli.h file that I have included does get printed.
I have used the following commands:
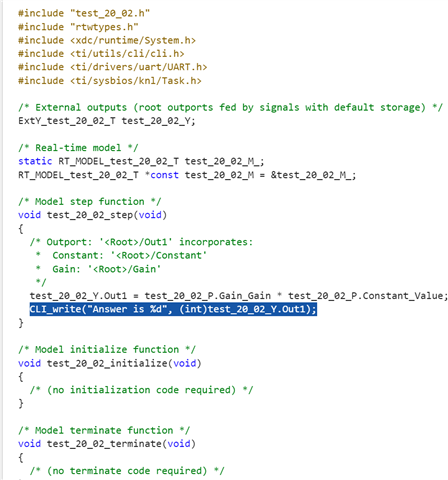
System_printf("Output is: %d\n", (int)test_20_02_Y.Out1);
CLI_write("Answer is: %d\n", (int)test_25_01_Y.Output);
I have also tried uart_write, but in every case, only the output from the cli.h file is getting printed on the console.
What command should I use to print my output on the console?
Note: I have included the necessary header files, and the binary is being generated without throwing any errors.