Other Parts Discussed in Thread: IWRL6432,
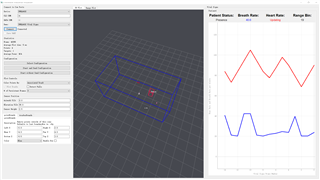
Hi , I am working with IWRL6432_Vital_Signs demo test using IWRL6432BOOST. This demo is located in \radar_toolbox_1_30_01_03\source\ti\examples\Medical\IWRL6432_Vital_Signs\. Now, I want to use Industrial_Visualizer(shown below) tool to run this demo by ceiling mount. So I change the default wall mount cfg file to ceiling mount cfg based on my understanding, but I found the resuit of 3D plot is incorrect, the location data is wrong, especially no movement in the Y-axis. So I have questions below:
1. Whether Industrial_Visualizer tool supports the ceiling mount cfg (as follows) test? Or I need to change the tool code ?
sensorStop 0
channelCfg 7 3 0
chirpComnCfg 8 0 0 256 4 23 0
chirpTimingCfg 6 18 0 75 60
frameCfg 2 8 575 32 133 0
antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.418 2.418
guiMonitor 2 0 0 0 0 1 0 0 1 1 1
sigProcChainCfg 32 2 1 2 4 4 0 15
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -70 70 -40 40
rangeSelCfg 0.1 10.0
clutterRemoval 1
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
adcLogging 0
lowPowerCfg 0
factoryCalibCfg 1 0 40 0 0x1ff000
boundaryBox -2 2 -4 4 -0.5 3
sensorPosition 0 0 2.5 0 90
staticBoundaryBox -1 1 -1 1 -0.5 3
gatingParam 3 2 2 2 4
stateParam 3 3 12 1000 3 1000
allocationParam 6 10 0.1 4 1.5 20
maxAcceleration 1 0.4 1
trackingCfg 1 2 100 1 61.4 191.8 100
presenceBoundaryBox -2 2 -4 4 -0.5 3
microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1
classifierCfg 1 3 4
baudRate 1250000
sensorStart 0 0 0 0
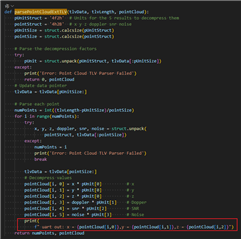
2. I think the key point is translation of coordinate axis. I have checked the code of IWRL6432_Vital_Signs demo and Industrial_Visualizer, I found They all use the coordinate transformation method. According to my understanding, only one of them need to use the transformation.... Maybe I was wrong.
Please help me to find the bug.
Thank you very much!