


I tried differnt .CFG from the MMWAVE_L_SDK_05_04_00_01 Visualizer,
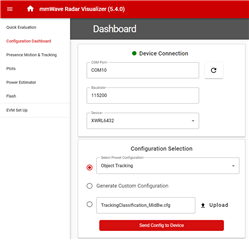
'Configuration Selection' in the 'configuration Dashboard',
found 'Preset Configuration [Object Tracking]' and the CFG file from SDK example folder values differnt
C:\ti\MMWAVE_L_SDK_05_04_00_01\examples\mmw_demo\motion_and_presence_detection\profiles\xwrL64xx-evm
where can I find the explanation about those argument values?
where the 'preset configuration' stored?
% ****************************************************************
% Configuration Start
% ****************************************************************
sensorStop 0
channelCfg 7 3 0
chirpComnCfg 16 0 0 128 4 28 0
chirpTimingCfg 6 32 0 40 60.5
frameCfg 2 0 200 64 100 0
antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.418 2.418
guiMonitor 2 3 0 0 0 1 0 0 1 1 1
sigProcChainCfg 32 2 3 2 8 8 1 0.3
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -70 70 -40 40
rangeSelCfg 0.1 10.0
clutterRemoval 1
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
adcLogging 0
lowPowerCfg 1
factoryCalibCfg 1 0 40 0 0x1ff000
boundaryBox -3.5 3.5 0 9 -0.5 3
sensorPosition 0 0 1.9 0 0
staticBoundaryBox -3 3 0.5 7.5 0 3
gatingParam 3 2 2 2 4
stateParam 3 3 12 50 5 200
allocationParam 6 10 0.1 4 0.5 20
maxAcceleration 0.4 0.4 0.1
trackingCfg 1 2 100 3 61.4 191.8 100
presenceBoundaryBox -3 3 0.5 7.5 0 3
microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1
classifierCfg 1 3 4
profileSwitchCfg 0 25 25
baudRate 1250000
sensorStart 0 0 0 0
% ****************************************************************
% ****************************************************************
% Configuration Start
% ****************************************************************
% ***************************************************************
% TrackingClassification_MidBw: Chirp configuration and
% processing chain are designed to detect, localize, track, and
% classify objects in indoor or outdoor environments.
% This config utilizes ~1GHz BW (~20cm range resolution) and
% enables all the available six antennas of the EVM.
% The maximum unambigious range of this config is ~10m.
% In this config, auto mode (major and minor) is enabled to track
% objects with any kind of motion, including fine movements.
% ***************************************************************
sensorStop 0
channelCfg 7 3 0
chirpComnCfg 16 0 0 128 4 28 0
chirpTimingCfg 6 32 0 40 60.5
frameCfg 2 0 200 64 100 0
antGeometryCfg 0 0 1 1 0 2 0 1 1 2 0 3 2.418 2.418
guiMonitor 2 3 0 0 0 1 0 0 1 1 1
sigProcChainCfg 32 2 3 2 8 8 1 0.3
cfarCfg 2 8 4 3 0 12.0 0 0.5 0 1 1 1
aoaFovCfg -70 70 -40 40
rangeSelCfg 0.1 10.0
clutterRemoval 1
compRangeBiasAndRxChanPhase 0.0 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000 1.00000 0.00000 -1.00000 0.00000
adcDataSource 0 adc_data_0001_CtestAdc6Ant.bin
adcLogging 0
lowPowerCfg 1
factoryCalibCfg 1 0 40 0 0x1ff000
boundaryBox -3.5 3.5 0 9 -0.5 3
sensorPosition 0 0 1.9 0 0
staticBoundaryBox -3 3 0.5 7.5 0 3
gatingParam 3 2 2 2 4
stateParam 3 3 12 50 5 200
allocationParam 6 10 0.1 4 0.5 20
maxAcceleration 0.4 0.4 0.1
trackingCfg 1 2 100 3 61.4 191.8 100
presenceBoundaryBox -3 3 0.5 7.5 0 3
microDopplerCfg 1 0 0.5 0 1 1 12.5 87.5 1
classifierCfg 1 3 4
baudRate 1250000
sensorStart 0 0 0 0
% ****************************************************************
% Configuration End
% ****************************************************************
