Other Parts Discussed in Thread: TMAG5273,
My team and I are designing for an application where we need to measure the angle of a rotating magnet placed above the sensor. The magnet rotates +/-40 degrees from its rest position about the y-axis (with respect to the sensor measuring the z-axis). After reading through the AN on Hall effect sensor angle measurement, we believe the "One Bipolar Sensor, Lookup Table Calibrated" method would best suit our application. The limited rotational range of the magnet prevents us from measuring the magnetic peaks. We also cannot place the sensor on-axis with the magnet due to mechanical constraints, preventing us from using a multi-axis sensor like the TMAG5273 without calibration, which we cannot reliably calibrate due to the limited rotational range. We can measure the +40 degree, -40 degree and 0 degree angles in our application, so we can at best perform a linear calibration.
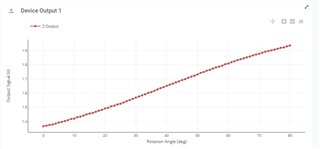
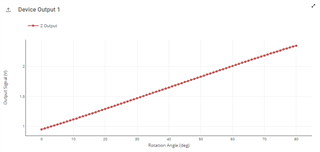
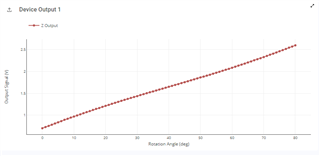
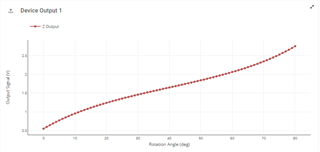
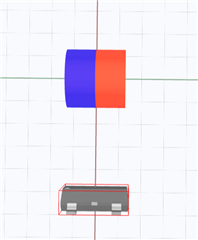
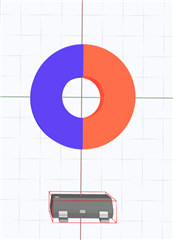
My question is what magnet shape is best suited for this type of application to achieve the most linear results. The AN suggests a diametrically magnetized ring or cylinder. Given our constraint on the magnet being about the y-axis, I've drafted an axial cylinder and a diametric ring using TIMSS. I noticed the axial cylinder appears exhibit more linearity than the diametric ring across the 80 degree rotation. Is there other options I should consider? I don't fully understand how the magnet shape, magnetization pattern, and geometry have on the linearity of the measured output.
Let me know if there is more detail I can provide.
Thanks,
Jeff