


Hello TI Experts,
I'm trying to use the IWR6843AOP device to run People Tracking with Vital Sign functionality. It works on my Windows computer, and I've consulted the People Tracking with Vital Sign Measurement User's Guide to understand the UART output data format. According to the guide, the frame header structure named "sync" should send "02 01 04 03 06 05 08 07" when the device starts. Everything runs smoothly on my Windows computer.
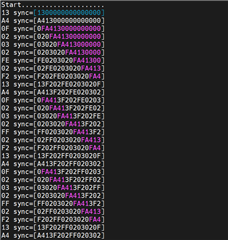
However, when I switch to my Linux computer, the device sends completely different data. The "sync" data changes every time, and the device only sends 8 bytes of data.
Here is the configuration I send to the IWR6843AOP device:
% SDK Parameters
sensorStop
flushCfg
dfeDataOutputMode 1
channelCfg 15 7 0
adcCfg 2 1
adcbufCfg -1 0 1 1 1
lowPower 0 0
% Detection Layer Parameters
profileCfg 0 60.75 30.00 25.00 59.10 394758 0 54.71 1 96 2950.00 2 1 36
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 0 0 0 0 0 2
chirpCfg 2 2 0 0 0 0 0 4
frameCfg 0 2 96 0 55.00 1 0
dynamicRACfarCfg -1 4 4 2 2 8 12 4 12 5.00 8.00 0.40 1 1
staticRACfarCfg -1 6 2 2 2 8 8 6 4 8.00 15.00 0.30 0 0
dynamicRangeAngleCfg -1 0.75 0.0010 1 0
dynamic2DAngleCfg -1 3.0 0.0300 1 0 1 0.30 0.85 8.00
staticRangeAngleCfg -1 0 8 8
antGeometry0 -1 -1 0 0 -3 -3 -2 -2 -1 -1 0 0
antGeometry1 -1 0 -1 0 -3 -2 -3 -2 -3 -2 -3 -2
antPhaseRot 1 -1 1 -1 1 -1 1 -1 1 -1 1 -1
fovCfg -1 70.0 70.0
compRangeBiasAndRxChanPhase 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1 0
% Tracker Layer Parameters
staticBoundaryBox -3 3 0 7.5 0 3
boundaryBox -0.5 0.5 0.2 1 1 2
sensorPosition 1.5 0 0
gatingParam 1 1 1 1 10
stateParam 2 2 2 1 1 1
allocationParam 20 100 0.1 20 0.5 20
maxAcceleration 1 0.1 1
trackingCfg 1 2 800 5 46 96 55
presenceBoundaryBox -3 3 0.5 7.5 0 3
sensorStart
This is the received data on my Linux computer.
I would appreciate any insights or suggestions on why the data format changes between Windows and Linux environments and how to resolve this issue.
Thank you.
