Other Parts Discussed in Thread: IWRL1432,
Hello TI customer service team,
I am a software engineer from Arima, Taiwan, and our company is currently attempting to develop a long-range (approximately 100 meters) radar using IWRL6432. We have observed some strange phenomena regarding the maximum distance limitation of the radar and would like to consult with TI.
Initially, we used IWRL6432 and tried running the out-of-the-box demo and motion and presence demo provided by the SDK. We first attempted to test the maximum distance under normal usage of IWRL6432, which was approximately 6 meters. Beyond this distance, we couldn't observe any point cloud on the visualizer. I thought that the maximum distance limitation of the FMCW radar is determined by the intermediate frequency of echoes and the slope of the chirp. So, I attempted to calculate the slope and the upper limit of the intermediate frequency (limited by ADC sample rate) at that time and found that the calculated maximum distance was around 20 meters. This was significantly different from the observed 6 meters. Out of curiosity, I began trying to modify the chirp slope parameter, gradually decreasing the slope, and observing the increase in the maximum distance of echoes. During this process of decreasing the slope, I observed that the maximum distance of the point cloud signal on the visualizer indeed slowly increased, but the increase was not inversely proportional to the slope decrease. When I decreased the slope from 40 to 6, theoretically, the maximum distance should increase from 20 meters to 150 meters. However, the observed maximum distance of the point cloud signal only slowly increased from 6 meters to 12.5 meters. I wondered whether this significant difference meant that there were any critical factors I hadn't considered, so I observed the output of the range profile. I set the number of samples per chirp to 128 during testing, and I did observe 128 output values in the range profile. However, for some reason, the position of the point cloud was always limited to a very short distance.
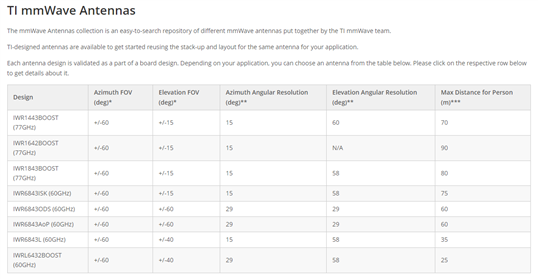
I recently noticed a demo video of IWRL1432 on the TI official website, demonstrating a radar warning system for vehicles approaching from behind bicycles, with a tracking distance of up to 70 meters. I thought that the only difference between 6432 and 1432 should be the frequency band used, which is 60GHz and 77GHz, respectively, and the rest of the hardware should be exactly the same. I still don't understand why there is such a big difference in the maximum distance. I hope TI can provide some guidance on this matter!