Hi Ti Temas
I am ED Wu.
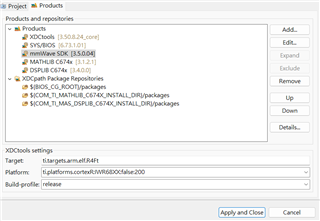
Our teams using 3D_Occupancy_Detection demo with AWR6843AOP and sample PCB designed based on AWR6843.
The SDK version link to mmwave_sdk_03_05_00_04
We have the following questions to ask:
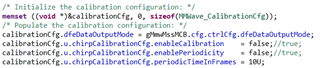
1. We found that both one-time calibration and periodic calibration are turned off. Is there any reason?
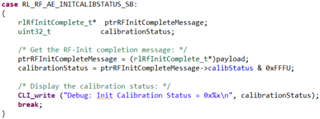
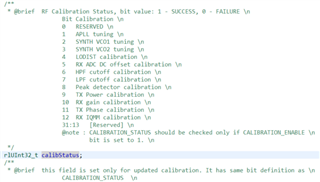
2. The CASE RL_RF_AE_INITCALIBSTATUS_SB in the function OccupancyDetection3D_eventCallbackFxn can display the initialization calibration status, but no matter how it is set, the result will be the same (0xffe).
Is the calibStatus data structure updated correctly?

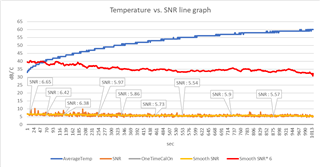
3. In the document Self-Calibration in TI’s mmWave Radar Devices, 6.3 Application-Controlled One Time Calibration, When the one-time calibration is triggered, the internal temperature is measured to set the gain index. In this case, can one-time calibration be used instead of periodic calibration? And avoid the influence of temperature on the antenna?
Regards, ED