Other Parts Discussed in Thread: TIDEP-01023, , AWR6843
hi,
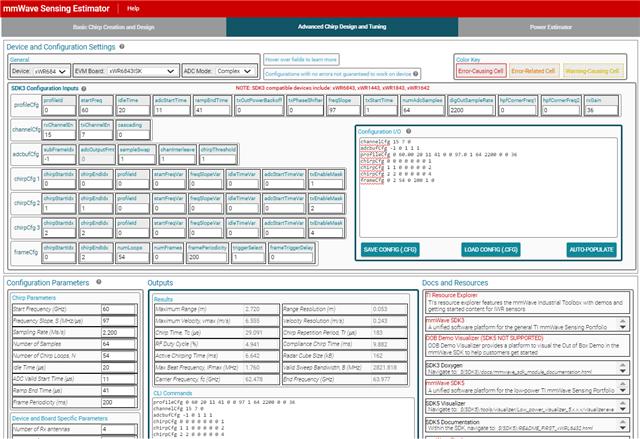
with reference to "Design Guide: TIDEP-01023 Child-Presence and Occupant-Detection Reference Design Using 60-GHz Antenn on-Package mmWave Sensor", pleas refer page no:7(table 2.1)..i can enter only first 5 parameters using mmwave sensing estimator tool (version 2.4) under basic chirp design and creation(refer attached screenshot) and donot' have any option for user to chose other parameter like idle time ,adc_valid start time and all.
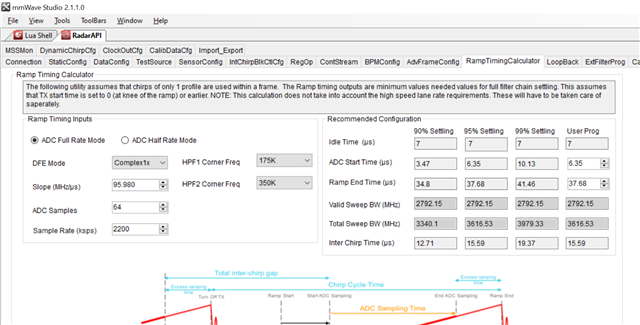
Question 1: please check and confirm, how did you calculate the remaining parameters available in the table 2.1 of reference design ?
we have checked the TI design example using AWR6843ISK evaluation kit by loading the .bin file from "radar_toolbox_1_30_01_03\source\ti\examples\InCabin_Sensing\AWR6843_CPD_with_Classification\prebuilt_binaries and
running the visualizer.ex on the PC from the folder "radar_toolbox_1_30_01_03\tools\visualizers\InCabin_CPD_w_Classification_GUI\AWR6843_CPD_w_Classification_visualizer.exe.
please refer chirp design parameters to be used are mentioned under folder "C:\ti\radar_toolbox_1_30_01_03\tools\visualizers\InCabin_CPD_w_Classification_GUI\config_file\vod_6843_isk_frontMount_2row.cfg"
profileCfg 0 60.00 2789 11 41 0 0 97.0 1 64 2200 0 0 36
profileCfg 1 60.00 20 11 41 0 0 97.0 1 64 2200 0 0 36
chirpCfg 0 0 0 0 0 0 0 1
chirpCfg 1 1 1 0 0 0 0 2
chirpCfg 2 2 1 0 0 0 0 4
frameCfg 0 2 54 0 200 1 0
question 2: kindly check and confirm did these chirp design parameters are calculated using mmwavesensing estimator ? a) if yes,let me know how to do it using mmwavesesing estimator tool?
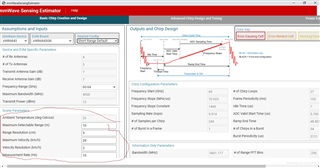
i have tried with "mmwave sensing estimator tool " for same design parameters of
Starting frequency (GHz) 60
Maximum range, Rmax (m) 2.72
Range resolution (cm) 5.3
Maximum velocity (m/s) 1.7
Velocity resolution (m/s) 0.0154
it is observed thar calculated parameters(screenshots attached) are not matching with ""Design Guide: TIDEP-01023 Child-Presence and Occupant-Detection Reference Design Using 60-GHz Antenna on-Package mmWave Sensor",please refer page no:7(table 2.1) parameters".


question 3: kindly check and confirm incase Chirp design parameters are calculated using some other tools, kindly share the details of the same.