Hi,
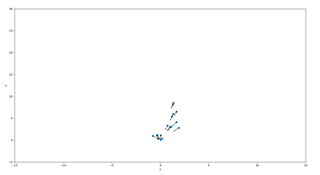
I am using AWR 1843, and i am doing Out of The Box Lab (https://dev.ti.com/tirex/explore/node?node=A__ACG08uvVuwpX-4E74miWtw__radar_toolbox__1AslXXD__LATEST), but i get strange detection at XY (0, 0) almost as you can see in the following screenshot

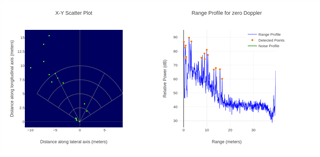
However, as in the following pic, there is now thing blocking the radar :

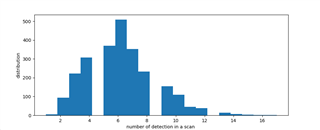
A following question is sometime, Radar given me really few spares point cloud like (6 detection ), and for the same FOV given more than 20 points, why, do i need to set up sth in the Firmware, to get stable like 20 points or so.
Thanks!
Dev team aitonomi