


Other Parts Discussed in Thread: AWR1843, IWR1843,
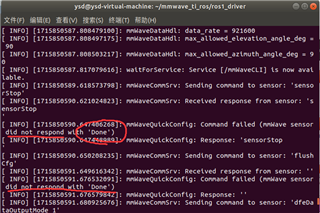
In ubuntu system use ROS driver to read the point cloud information acquired by this radar, but the following situations often occur resulting in the inability to read the point cloud.
Including:
1.I've made no changes to any of the config files, but I'm still getting the problem in the diagram randomly. Note that it is random, and may not report this error when no changes are made.
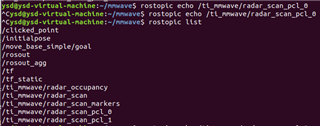
2.Point cloud topics can be read, but topic/ti_mmwave/radar_scan_pcl_0 doesn't emit any data
3.When the data is successfully read, the current point cloud data can be displayed in rviz, but after a slight touch of the millimetre wave radar and a wobble, the point cloud may disappear immediately, as in the video
