Hi everyone,
For our project to detect humans, we used IWRL6432 radar sensor, and for the antenna design, we used 2D Antenna Variant, which promises us a very long distance to detect human (10 meters).
However, the range of the demo (motion and presence detection) is very low.
Its range is almost 2 – 2.5 meters when we use industrial visualizer to see, do you have any idea what would be the reason?
Do you have any suggestions to make it better?
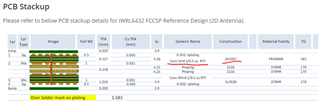
We only changed the “antGeometryCfg” parameter since we are using 2D Antenna Variant design from: https://dev.ti.com/tirex/content/radar_toolbox_2_00_00_06/docs/reference_designs/IWRL6432_FCCSP_Reference_Design/iwrl6432_FCCSP_reference_design.html
Can you guys help about this situation? Is there a way to fix this problem without changing the design? Or what might be the problem for such a short range?
We are considering to use antenna design from dev kit (IWRL6432BOOST) instead of 2D Antenna Variant, since dev kit is seems to be performing better according to our tests, but it is our plan B.
We would like you to confirm if the antenna design (from dev kit) is okay to use with 4 layer stackup?
Lastly, our custom board also will be inside an ABS box, will it effect the range? But I think electromagnetic waves should be able to pass the materials like ABS.
Thank you for your help,
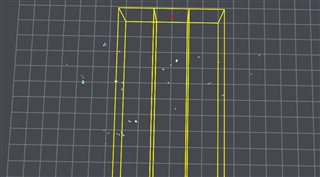
Antenna design is same as the TI reference design (2D Antenna Variant).
Our custom board's Antenna Design:

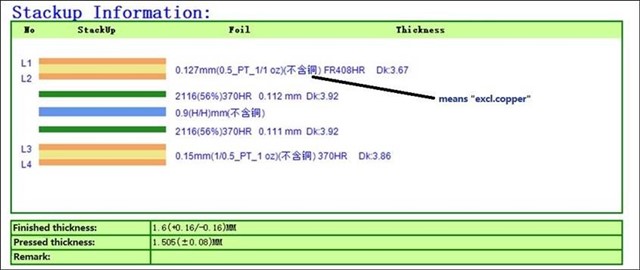
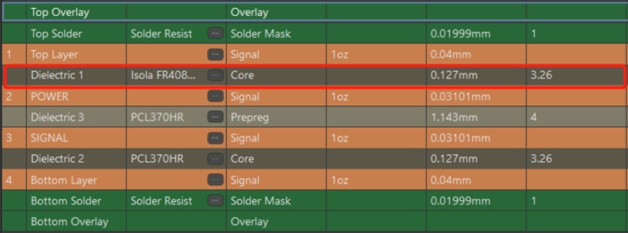
Current stackup of our board:
*Manufacturer suggested to use 0.15mm on the bottom layer to not delay the production (they had no 0.127mm thickness ready at that moment)