Other Parts Discussed in Thread: AWR2944
Tool/software:
Hi TI team,
We’re trying to evaluate AWR2944 EVK. This is connected to the obstacle detection during door opening scenario we explored last year.
Basically, we’re not able to run the precompiled firmware; the only one we can run fails when we try to send a configuration and start. My colleague has describe the issue in detail below. We think the issue could be mismatch between the hardware and SDK versions. Could you point us to a direction.
Here’s the version info
- HW: AWR2944 EVK rev D
- SDK: mmwave_mcuplus_sdk_04_04_01_02
- Radar_toolbox_2_10_00_04
More details:
The labs we’ve tried to demo:
- 2944 OOB Object Data over CAN
- High End Corner Radar
- Nonos oob 2944
- Out of Box Demo
We seem to be experiencing similar issues with them all, seeming to stem from configuration file
First, 2944 OOB Object Data over CAN
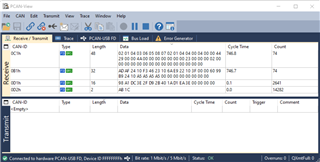
When running this one we go through the normal process outlined in the readme. Put the device in UART boot mode, flash the sbl and appimage, then switch the device to QSPI boot mode and power cycle. While trying to use the “automotive visualizer” we don’t really see any error codes being printed out in the console, but after going through the steps (select demo, select interface, connect, select configuration, start and send configuration), nothing happens. We’ve tried going through the UART interface and CAN interface, both with the same result. For reference, we are using the XDS USB port and I’ve tried both CAN ports on the EVK, but are still not able to see any data being visualized.
High End Corner Radar
We go through the same process as above (change boot mode, flash, change boot mode, power cycle, run visualizer). We will also select the HECR demo on the GUI. This is the only one that we’ve actually got it to visualize any data. However, we can only get it to work if we do not send a configuration (Start without send configuration button). If we try to select one of configurations included in the demo, this error will be continuously logged:
ERROR: No data detected on COM Port, read timed out
Be sure that the device is in the proper mode, and that the cfg you are sending is valid
Nonos oob 2944
This one we tried both the Automotive visualizer and the web based mmWave Demo Visualizer.
In the automotive visualizer, we experience the same error code as the high end corner radar.
But I see that in the users guide it is recommended to use the web based mmWave Demo Visualizer on Chrome. To begin, we are able to connect to the device, however when trying to create a configuration on the GUI and send, the only thing that is printed is “Skipped” and when we try to load one from the PC, all the configs are loaded, but when it sends the final sensorStart, we get this error printed.
Debug: Init Calibration Status = 0xffe
After searching around on the forums, I found a post that says this error correlates to an error in the chirp config, but this happens when we try all of the provided config files. Also for reference we are using the TDM processing chain, with the TDM config files.
Finally, Out of Box Demo
This one we just tried using the mmWave Demo Visualizer, and when we first connect, the ability to configure the radar from the GUI disappears and gives a message that says to load a configuration from the PC. Since there doesn’t seem to be any included configuration file on this example, I tried the same ones from the Nonos oob 2944 example, because it seemed to be the most similar.
After skipping all of the unsupported commands, we see this same error.
Debug: Init Calibration Status = 0xffe
Is there any support you guys can provide us, we are trying to evaluate the radar.
Sincerely,
Richard