Other Parts Discussed in Thread: SYSBIOS, MMWAVE-SDK
Tool/software:
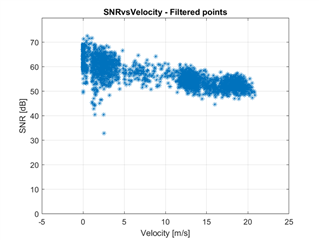
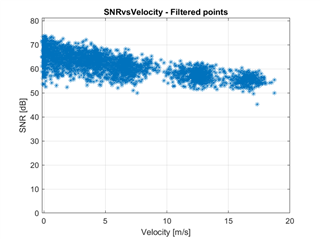
When assessing our Doppler radar sensor, which utilizes the IWR6843 chip, we observed that the Signal-to-Noise Ratio (SNR) varies with velocity.
According to our findings, there appears to be a correlation where an increase of velocity by 3 m/s corresponds to a decrease of SNR by 1dB. We're unsure if this phenomenon is widely recognized as a standard behavior in radar systems, as we haven't found relevant literature discussing it.
We're curious about the underlying reasons behind this relationship. If you have any insights or suggestions, we'd greatly appreciate them.