Tool/software:
Hi,
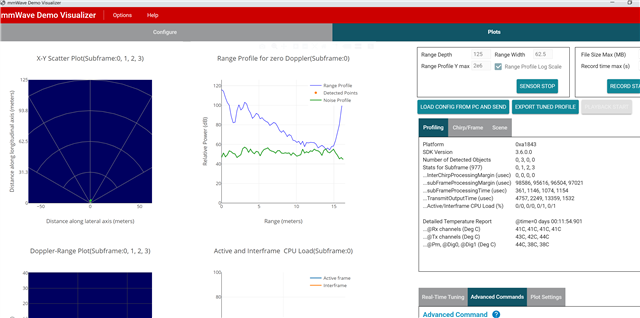
The configuration profile advanced subframe will be used in the OOB Demo project. The configuration detection is positive, but their is a problem in the last object point that was detected is displayed in the mmWave Demo Visualizer. Methods of fixing the issue.
let me explain the scenario "if an object moves towards to sensor, the plotter shows the position of the object. but the object cross the sensor, the plotter retains the last position of the object".